Астронавт будет управлять лунным роботом с космической станции
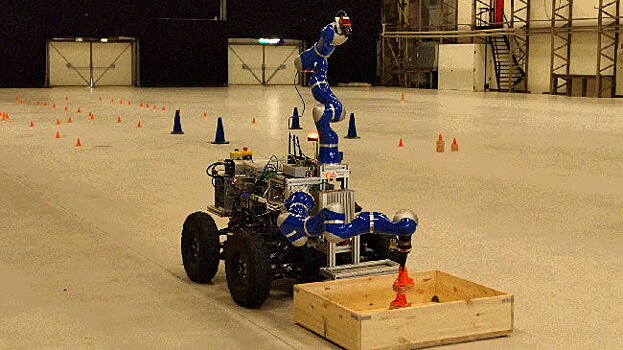
В ноябре этого года космонавты на международной космической станции будут практиковаться в дистанционном управлении роботом на Земле. В будущем астронавты смогут дистанционно управлять роверами на Луне или даже на Марсе с близлежащих орбитальных станций. Чтобы увидеть, насколько хорошо это может сработать, астронавты на Международной космической станции вскоре проведут эксперимент ANALOG-1 Европейского космического агентства (ЕКА), предназначенный для проверки того, насколько хорошо экипаж на Международной космической станции может управлять лунным ровером в сотрудничестве с наземной командой. «Космос - это суровое место для людей и машин. Дальнейшее исследование Солнечной системы может включать отправку роботов-исследователей, перед отправкой людей, для поиска воды на неизведанных планетах», - сказал Уильям Кери, ученый ESA и главный исследователь по эксперименту ANALOG-1. «Такой подход может значительно увеличить научную отдачу от этих миссий, а также предложить способ избежать потенциального загрязнения окружающей среды людьми, приземляющимися на поверхность. Это нужно сделать до того, как мы сможем ответить на вопросы о существующей или предыдущей жизни на Марсе». Эксперимент, который планируется провести в ноябре этого года, продлится около двух часов, в течение которых астронавт ЕКА Лука Пармитано будет использовать специализированную компьютерную программу и связь с наземной группой для дистанционного управления ровером и роботизированной рукой ровера на луноподобной местности в Нидерландах. Пармитано будет поручено собрать и проанализировать образцы дистанционно с помощью ровера и его руки. Для этого он будет использовать «джойстик» с обратной связью Sigma 7 и возьмет геологические образцы для имитации сбора образцов на Луне. «Джойстик имеет обратную связь по усилию. Это позволяет оператору почувствовать то, что чувствует робот», - написал в своем заявлении ведущий инженер ESA по робототехнике Томас Крюгер. «Например, если робот касается хрупкого объекта, он измеряет и передает информацию обратно пользователю, который поймет деликатность образца сигналами на джойстике Sigma 7. Затем они сможет управлять рукой более осторожно». Одной из основных проблем, которые могут повлиять на эксперимент, будет то, насколько хорошо астронавты способны маневрировать и контролировать ровер в условиях микрогравитации, где согласно утверждению, человеческие чувства, такие как осязание и ощущение, бесполезны. ANALOG-1 проверит, как Пармитано управляет аппаратом в уникальной среде с борта космической станции, а также насколько хорошо команда на станции и на земле взаимодействуют, чтобы вести "лунного" робота к цели.